MOTEC伺服驱动器多轴同步主从控制-相对基准模式和绝对基准模式(第6篇)
MOTEC的多轴主从控制模式利用现有的硬件条件,以通用驱动器的价格来达到多轴同步控制的功能,解决方案具有更高的性价比和及其简便的操作使用方式。系统可组建最多1主3从的主从控制系统,可以运行在总线模式、脉冲方向模式和模拟量模式。

2.主从相对基准模式和绝对基准模式
单轴运动控制的运动方式中有相对运动和绝对运动的控制方式,他们通常是指设定运动位置的方式。而这里的相对和绝对基准模式不同,他们是特指一种主从电机基准位置的对齐方式。
在主从位置控制模式下,主站给从站发送位置同步信号,从站根据主站发送过来的位置信息进行同步控制。为了保证设备的正常同步运动,在主从电机通过位置对齐工作(可以用Homming或控制其他方式)以后需要设定主从轴电机的位置基准值。即主从同步控制的基准位置,位置基准值设定完毕之后,接下来的运动距离即以这个基准值作为运动基点。位置基准值的设定是由主从驱动器自动完成的,基准位置的设定方式有两种可以分别应用于不同的场合。
2.1绝对基准位置模式
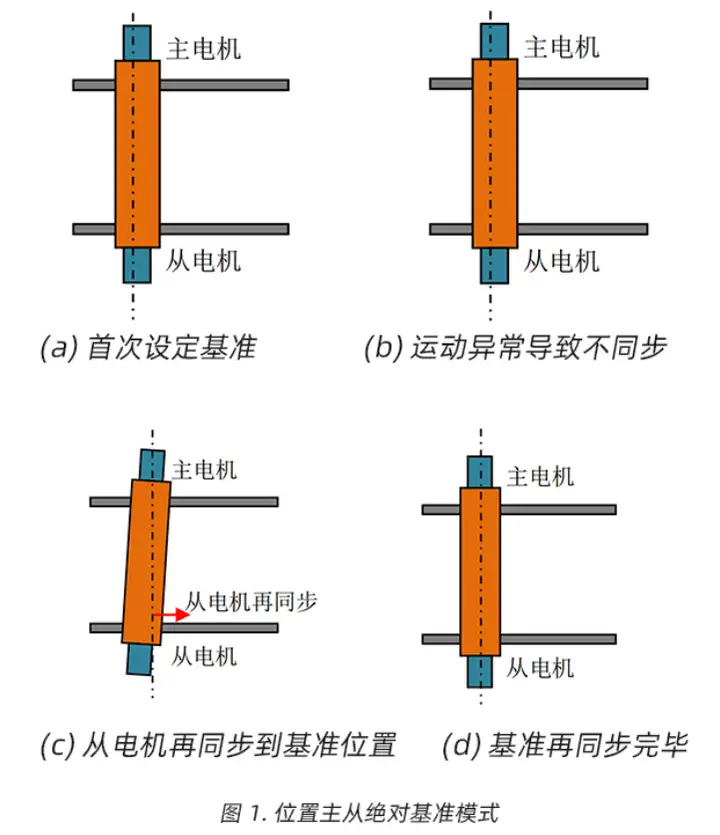
绝对基准位置模式只在控制模式从非主从模式到主从模式切换时(或系统启动时)进行一次自动设定,而在电机释放和使能切换时(包括报警引起的释放)不进行二次设定。在电机再次使能时如果主从电机之间相对位置偏移了原来所设置的基准,电机使能时从轴会自动按照之前的基准位置自动对正到主轴的位置。在同步完成之前,主电机不接收运动指令。绝对基准位置模式的工作过程如图1所示,这种模式的典型应用是龙门驱动方式,他在整个过程中两个电机都是处于主从模式;
2.2相对基准位置模式
相对基准位置模式除了在控制模式从非主从模式到主从模式切换时(或系统启动时)进行一次自动设定,而在每次电机释放和使能切换时(包括报警引起的释放)都要进行一次基准位置设定。在电机再次使能时如果主从电机之间相对位置偏移了原来所设置的基准,电机使能时从轴不会按照上一次的基准位置自动对正到主轴的位置,而是重新进行基准位置的设定。相对基准位置模式的工作过程如图2所示;
3.后续连载章节
以后的章节中,我们会分成不同的主题对多轴主从同步控制模式进行详细的介绍
1、主从控制模式简介;
2、主从位置控制;
3、主从速度控制;
4、主从电流控制;
5、主从控制回零;
6、主从控制不同编码器分辨率电机的混合使用;
7、主从控制电子齿轮控制方式;
8、主从控制PWM控制方式;
9、主从控制脉冲模式;
10、主从控制交叉耦合控制方式;
11、主从控制双电机消隙控制;
12、主从控制电子凸轮控制方式;
13、主从任意轨迹运动控制方式;
14、主从PLC功能简介;
15、主从PLC功能P2P_GO_NEXT运动;
16、主从PLC功能PVT_GO_NEXT运动;
17、组建更多个轴的主从控制模式;
18、双轴驱动器主从控制功能说明;










