1.双电机驱动轨道巡检机器人
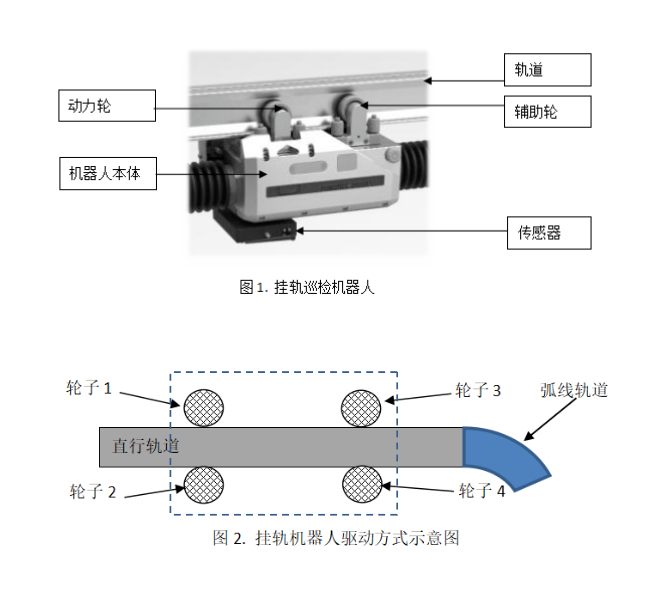
轨道巡检机器人是当前应用较为广泛的一种巡检机器人,机器人的基本结构如图1所示。根据载荷的重量以及机器人本体大小的不同,可以分为单电机驱动方式和双电机驱动方式。典型轮轨结构如图2所示(本文以4个轮子的方式作为分析对象,如果是其他的轮组结构,只要是双电机前后或左右配置的,都可以采用本文描述的控制方法),根据驱动方式不同,驱动轮的配置通常有下列几种方式:
1)轮子1、2、3、4中只有一个为驱动轮,其它是辅助轮。
2)轮子1、2、3、4中,1、3或2、4为驱动轮,其它是辅助轮,这种驱动方式为双电机前后轮驱动方式。
3)轮子1、2、3、4中,1、2或3、4为驱动轮,其它是辅助轮,这种驱动方式为双电机左右轮驱动方式。
2.双电机驱动方式存在的问题
由于单电机控制方式只需要控制好一个电机即可,控制方法比较简单,再此不在进行说明和分析。
对于双电机驱动方式由于两个电机都处于速度控制模式。随着电机的运行,两个轮子之间行走距离误差的累积有可能在两个电机之间产生较劲的现象,而在两个电机之间产生较劲的原因可能是:
1)轨道的误差造成两个轮子之间的行走距离累积误差;
2)轮子的误差造成两个轮子之间的行走距离累积误差;
3)在轨道圆弧拐弯处会形成内外轮拐弯半径不一样的情况,导致累积位置误差;
4)电机的控制误差造成两个轮子之间的行走距离累积误差;
由于以上的原因随着运行距离的增加,电机之间的较劲会越来越厉害,最后会导致驱动器过流报警或甚至烧毁电机或驱动器的情况发生。
3.MOTEC 的解决方案
为了解决双电机驱动方式在电机之间较劲的问题,MOTEC专门为此种控制方式提出了一种主从控制模式。(如图3)图3的示意图给出了MOTEC轨道巡检机器人双电机主从控制模式的说明,图中上位控制器可以通过RS232/RS485/CAN网络发送指令控制驱动器运行,也可以利用传统的脉冲或模拟量方式进行控制。
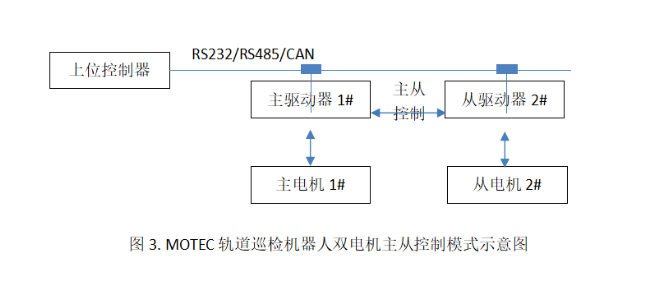
主从模式下,两个驱动器分为主驱动器和从驱动器,主/从驱动器通过驱动器的地址进行设置。奇数地址为主驱动器,偶数地址为从驱动器。主驱动器可以工作在位置/速度/电流模式。从驱动器的工作模式由从驱动器自动设定,主驱动器工作状态和设定值会通过主从控制的方式发送给从驱动器,这样从驱动器的控制会随着主驱动器的设定而变化,一起推动负载运动。从而解决了电机之间较劲的问题。
主从驱动器设置完毕以后,使用者只需对主驱动器进行控制操作,从驱动器对使用者来说是透明的。当然用户也可以通过通讯方式控制从驱动器电机的使能和释放。用户可以通过RS232/RS485/CAN监控当前主/从驱动器的状态。通过众多现场的实际应用,表明MOTEC这种主从控制模式可以很好的解决双电机驱动方式存在的较劲问题,给轨道巡检机器人双电机驱动方式带来了高可靠性的应用。
4.其它应用
本文所描述的轨道巡检机器人双电机驱动的主从控制模式,除了可以应用于轨道巡检机器人以解决电机较劲的问题之外,还可以应用于如下场景:
1)双电机或多电机驱动的轨道AGV;
2)双电机驱动的助爬器;
3)其他具有双电机刚性连接驱动同一负载的场合;
以上就是“MOTEC直流伺服驱动器主从控制模式在双电机驱动轨道巡检机器人上的应用”的全部内容了。
感谢您对MOTEC(中国)的关注,作为一家专注于高科技产品研发和生产的企业,我们致力于为广大客户提供高品质的产品和满意的服务。如果您对我们的产品感兴趣,欢迎联系我们的销售团队,期待与您合作。
MOTEC(中国)为您提供全方位的运动控制解决方案,共同开创美好未来。










